
Fuzzy Logic - Based control for autonomous vehicles in urban environments
Kulcsszavak:
Autonomous Vehicle, Fuzzy Logic, Obstacle detectionAbsztrakt
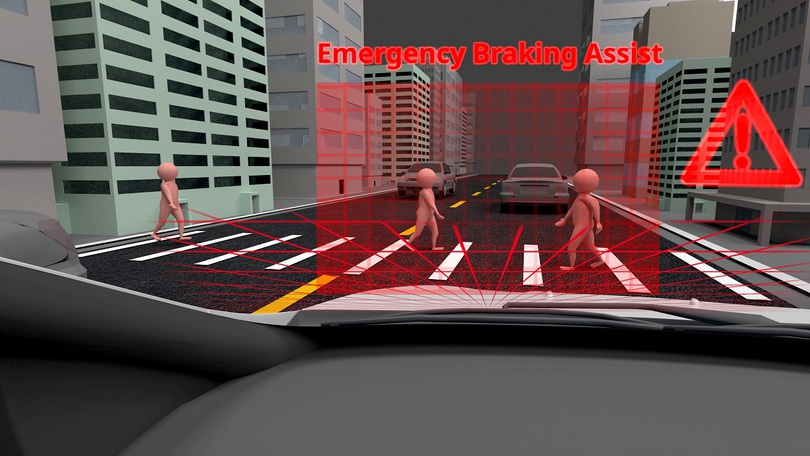
Abstract. Fuzzy logic is a mathematical approach used to model uncertainty in decision-making processes. Fuzzy logic has been widely applied in fields where uncertainties are encountered, such as automatic control, artificial intelligence, shape recognition system, robotics and other fields. Autonomous vehicles are vehicles that are able to move and function without the direct control of the driver. This paper shows how fuzzy logic makes decisions, what are the advantages and disadvantages of such a driving system in urban areas, the results of fuzzy logic "inference" and how fuzzy logic makes decisions instead of humans on the basis of forwarded information from the environment, and specifically the focus is on making decisions about speed and registering obstacles. These results are quite good, but it turns out that they still cannot completely replace humans, especially when it comes to some ethical issues.
Hivatkozások
Bagloee, S.A., Tavana, M., Asadi, M. Autonomous vehicles: challenges, opportunities, and future implications for transportation policies, Springer, 2016
A. M. Adil and U. F. Aziz: Sonar Based Obstacle Detection and Avoidance Algorithm, in IEEE International Conference on Signal Acquisition and Processing, 2009
Fuzzy Sets. In: First Course on Fuzzy Theory and Applications. Advances in Soft Computing, Springer, 2005
Stanford Encyclopedia of Philosophy, Fuzzy logic, First published 2016
Enric Trillas, Luka Eciolazag , Fuzzy logic, Springer, First edition 2015
Ishaya Emmanuel, Fuzzy Logic-Based Control for Autonomous Vehicle, Published by MECS Publisher., 2017
Dejan S. Misović, Intelligent system for traffic management based on the application of fuzzy logic, doctoral dissertation, Belgrade, 2019
Fagnant DJ, Kockelman K., Preparing a nation for autonomous vehicles: opportunities, barriers and policy recommendations. Part A,2015
https://www.roboticsbusinessreview.com/wp-content/uploads/2019/11/AdobeStock_222100401-scaled.jpeg, last accessed 27.5.2023.
Adilova, N.E. (2020). Consistency of Fuzzy If-Then Rules for Control System. In: Aliev, R., Kacprzyk, J., Pedrycz, W., Jamshidi, M., Babanli, M., Sadikoglu, F. (eds) 10th International Conference on Theory and Application of Soft Computing, Computing with Words and Perceptions,Springer, 2020
https://i0.wp.com/mcv.uab.cat/wp-content/uploads/2021/11/M5-project image.png?resize=691%2C399&ssl=1 ,last accessed 27.5.2023
https://bmdv.bund.de/SharedDocs/DE/Bilder/StV/Strassenverkehr/neue-fahrzeugsicherheitssysteme.jpg?__blob=normal, last accessed 27.5.2023.
##submission.downloads##
Megjelent
Folyóirat szám
Rovat
License
Copyright (c) 2024 Bánki Közlemények (Bánki Reports)

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.
Bánki Közlemények is loyal to open access for academic work. All the original articles and review papers published in this journal are free to access immediately from the date of publication. We don’t charge any fees for any reader to download articles and reviews for their own scholarly use.
The Bánki Közlemények also operates under the Creative Commons Licence CC-BY-NC-ND. This allows for the reproduction of articles, free of charge, for non-commercial use only and with the appropriate citation information. All authors publishing with the Bánki Közlemények accept these as the terms of publication.
{kind=link}
{kind=link}